
机器视觉微波振动融合入侵探测系统
Ø 1、系统概述
融合入侵探测系统采用机器视觉与微波预警、振动探测融合一体化的方式实现对入侵行为的探测以及对入侵目标的分类。此方案融合机器视觉、微波雷达和MEMS振动多种入侵探测技术,兼具主动和被动探测方式,具有预警距离远,定位精度高,适应性强,易于安装和调试等特点,适用于民航、核电、物流、石油、电力、烟草、公安、司法等行业。
Ø 2、系统原理及应用说明
系统采集前端探测,对围栏入侵行为进程三维立体探测,采集到的信号通过特征提取及波形特征相似度比对算法,可精准识别出敲击、撞击、摇晃、攀爬等入侵行为,并可以通过对算法进行机器学习训练,过滤掉飞机尾气、施工、风等噪声的影响。考虑到现场情况的复杂性,系统可针对单个探测器进行灵活设置,例如靠近道路地方缩短微波雷达探测距离;在树木和杂草较多的区域,提高微波雷达的抗干扰度,同时提高振动探测灵敏度。

图2、产品原理结构图
Ø 3、应用场景

图4、系统应用场景图
Ø 4、系统功能与特点
1) 视频微波区域入侵预警
2) 振动入侵报警
3) 目标识别分类
4) 报警数据融合处理
5) 告警事件管理
6) 视频监控联动
7) 声光报警联动
8) 电子地图
9) 配置管理
10) 系统管理
特点
l 采用机器视觉微波振动融合入侵探测器和机器视觉微波振动融合入侵探测主机,具备融合探测预警、目标行为分类和报警事件复核能力,实现点、线、面、空间相互结合的多层级综合防护;
l 支持入侵报警与视频、广播和辅助照明的报警声光联动。
l 后端采用人工智能机器学习算法,经过训练后的算法可以大幅度提高各种入侵行为识别的准确率,同时过滤掉飞机尾流、风等噪声。
l 精细化调整设备运行参数,针对本项目围界实际情况,例如靠近乡村公路、农田等特殊区域,系统可以进行有针对性的、精细化的调整,达到最佳运行效果。
Ø 5、配置选型
机器视觉融合入侵探测主机及机器视觉融合入侵探测器为机器视觉融合探测系统的重要组成部分,探测器配合机器视觉融合入侵探测主机完成系统对于围界外侧预警信号和围栏振动信号的探测,以及预警信息的融合判断及入侵行为的视频复核,具有预警多维度分析及报警精确定位能力,同时对入侵事件自动进行机器视觉复核。
机器视觉融合入侵探测器适用于单层围栏区域或双层围栏区域的钢筋网围栏。智能探测器通过RS485总线与智能融合主机通信,实时上传微波预警及围栏振动数据,同步视频信号复核,并由机器视觉融合主机完成多个探测器数据的融合分析处理,最终实现报警事件的判断及上报。
指挥中心安防系统(围界安防集成管理平台软件)由周界防入侵系统控制中心服务器、视频存储阵列、监控报警平台软件、视频储存及管理软件等组成。通过报警软件客户端及视频管理软件客户端,用户可阅览各个防区的报警、故障及实时工作状态,并设置、校核、人工干预控制相关的联动设备(视频、广播、照明等),完成报警集中处置。
集成平台采用现代多媒体及数字化监控技术,通过通信网络平台和管理服务器、管理软件等形成周界安防报警融合处理平台,实现对传感器入侵探测子系统、智能视频监控及分析子系统、广播通信子系统、智能照明子系统的信息集成。按照物联网体系的感知层、传输层和应用层进行划分与组织,形成1个平台与多个子系统的有机集成,实现由监控中心对全系统的信息集成和统一管理。
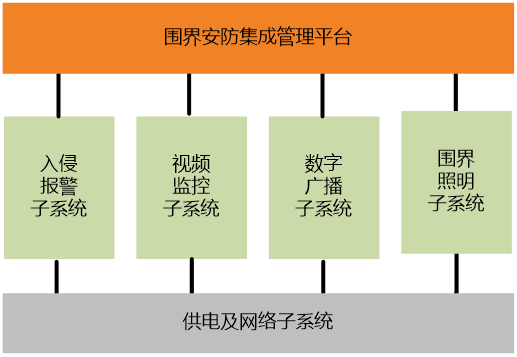
图7. 安防平台子系统集成架构图
当有人员靠近围界并穿过微波雷达预警振动探测器形成的虚拟围界时,系统自动在飞行区围界安防的值班席位上开启相关区域的视频,并提示监控人员可能发生非法入侵事件。值班人员通过集成平台开启广播及声光报警系统,警告入侵人员离开。当入侵人员进一步攀爬、翻越围界时,入侵探测系统提供入侵精确位置的报警信号并在值班席位上弹出入侵报警事件;同时通过集成平台向视频监控系统提供触发信号,联动球型摄像机转到报警点进行定位、抓拍及追踪,联动摄像机定位的精度应满足监控人员能够迅速准确定位报警的需求。通过现场的继电器设备联动广播系统自动播放警告语音;夜间联动灯光系统开启。监控人员按照相应的管理规则处理报警事件,并通知出勤点的值班人员到现场处理入侵事件。集成平台与机场其他安防系统做接口,实现统一监控和管理。




