智能围界防入侵系统的前端由分布式智能探测器节点组成,辅助以视频监控手段实现融合感知、协同探测,克服传统探测手段单一、误报率高、安全性差的缺点,同时可联动视频、声光及广播等设备。系统对围界进行全天时动态智能感知,具备很强的环境适应性和智能性,提高全天候、全天时的检测性能,降低虚警、误警率。
系统由五个部分组成,分别为前端探测子系统、视频监控子系统、联动控制子系统、网络传输及配套子系统、控制中心子系统(系统集成平台),如下图所示:
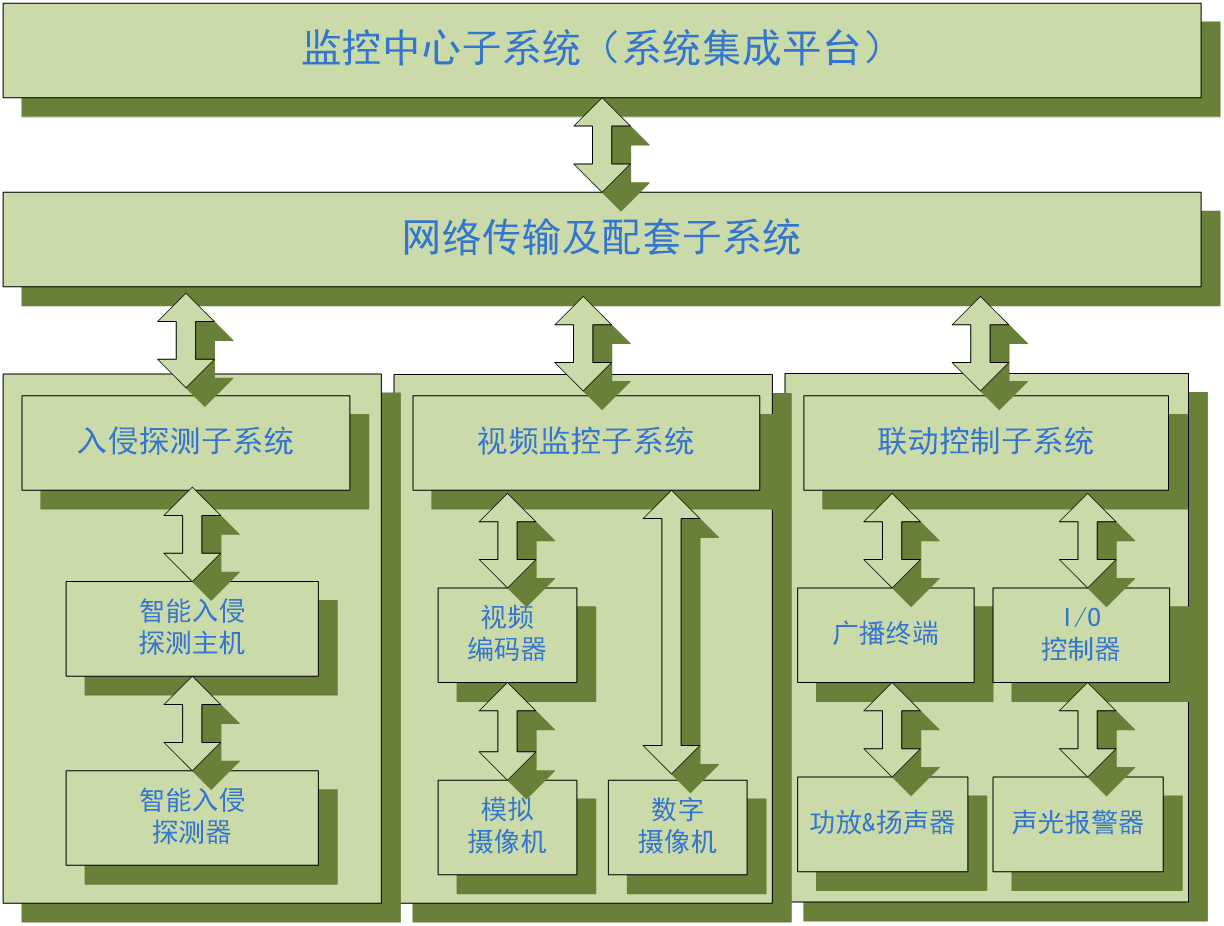
图1. 系统结构框图
前端探测子系统结合物理围界实际情况,防止人员攀爬、强力破坏围栏、越过围栏等各种入侵方式,系统采用在围栏上或砖墙上挂装智能入侵探测器,实现围界入侵目标检测、识别及定位,并能准确区分入侵者与非入侵行为。当上述入侵行为触发报警时,系统立即调用联动控制子系统,利用视频监控图像,值班人员可迅速直观的看到现场的实际情况,与此同时,系统集成平台后台系统会发送音频信号至现场的音频设备,向现场进行声音告警;值班人员亦可通过麦克风设备向现场通话告警,警告可疑人员。
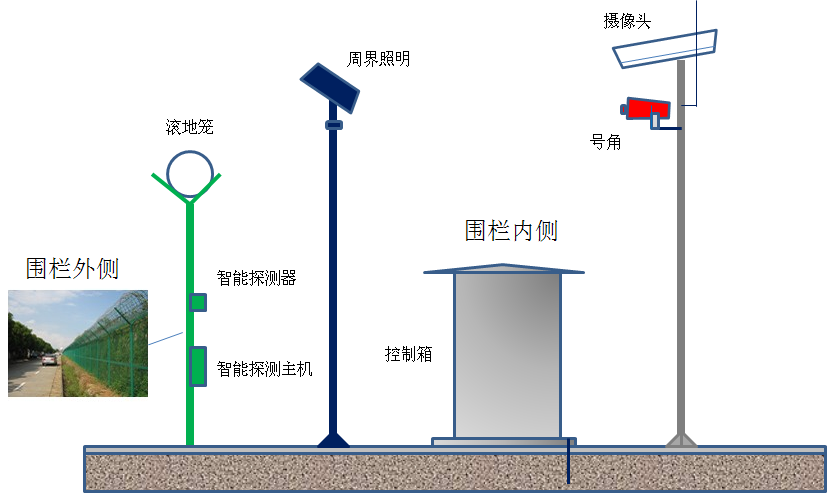
图2. 前端探测子系统结构框图
2.2.2 视频监控子系统
视频监控系统已经成为当前安全管理中最主要的工具,通过网络化、数字化视频监控技术,对于围界及周边道路等禁区进行实时图像监控,监控图像根据要求进行存储,各级管理人员可以在授权范围内方便地进行本地、远程图像调用和查询,第一时间发现安全隐患,避免更严重安全事件的出现。典型的网络监控解决方案由前端摄像机、编解码图像处理器、网络传输、监控管理平台和视频存储单元组成。
2.2.2.1系统功能
1)实时视频图像浏览及音频监听
2)云台操作控制
3)历史录像存储
4)录像检索和回放
5)用户与权限管理
6)视频监控客户端多画面业务
7)数字矩阵配置
2.2.2.2固定摄像机
固定摄像机每100米设置一套;
摄像机最低照度不高于0.1lux,1/2”CCD低照度彩转黑摄像机;
镜头选择保证50米外1.75米的人形在监视屏幕上所占高度约为屏幕高度的1/10;
考虑物理围界的高度约为3m(包含滚地笼),同时为尽量降低常年强风对摄像机的影响,摄像机的立杆高度不宜过高,建议3.5米高度为宜。
2.2.2.3云台摄像机
云台摄像机按实际需要进行布设;
由于云台摄像机监控范围比较大,选择7.5-120mm变焦镜头,特殊场合亦可选择具有更大变距范围的镜头,如10-200mm,以方便目标放大及跟踪;
为快速跟踪移动目标,云台选择高速360度旋转式的云台;
摄像机选择参考固定摄像机要求。
2.2.2.4 智能视频
智能视频服务器可实现基于真实场景的 3D 三维建模基础上的入侵检测,具有高检测率、极低的误报率。监控区域可通过软件设定,报警发生时,更可在视频图像上用方框标识出进入监控区的活动目标,并描出目标移动的轨迹,并同时检测出多个活动目标,使值班人员能够更准确、直观地看到这个区域中现场的详细情况,让入侵者无处可逃。
智能视频服务器可自动识别、跟踪进入视场范围内的入侵目标;
固定视频系统每100米一套,固定摄像机高度建议3.5米;
重要地段采用云台摄像机,云台摄像机高度建议4米。
2.2.3 联动控制子系统
联动控制子系统完成报警事件的联动控制,主要包括前端联动设备及后台集成管理系统的联动部分(在监控中心子系统描述)。前端联动设备主要包括摄像机、音频解码器、功放及扬声器、I/O控制器、声光报警器等。当系统发生报警事件时,后台集成管理系统按照系统预设的联动策略,与前端视频设备联动,自动调出报警防区、相邻防区的视频画面,使操作人员能迅速、直观地掌握现场的一切情况,判断是否采取相应的行动;同时系统可向现场发出声音告警,或通过麦克风向现场进行喊话,实现声光报警的综合;在夜晚或光线不足的情况下,辅助灯光照明装置必不可少,其在报警情况下的开启亦被视为联动控制动作。系统的联动控制如下图所示:
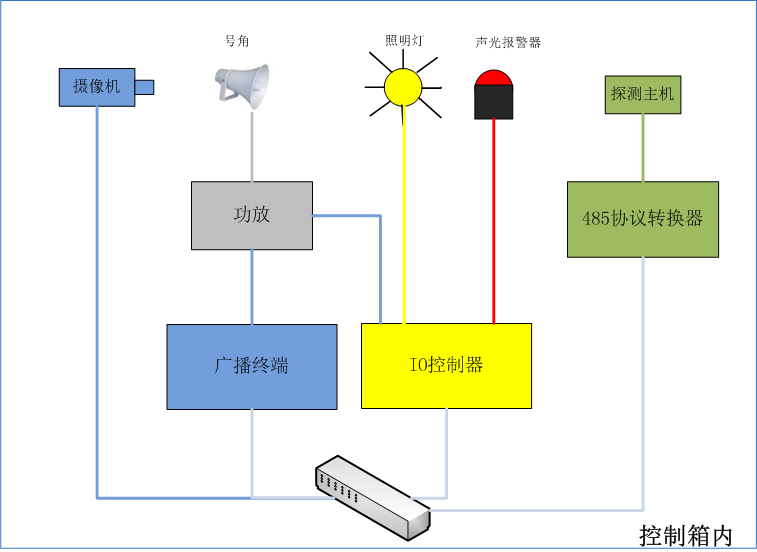
图3. 联动控制子系统结构图
2.2.4 网络传输子系统(含供电、防雷)
安防通信光缆由围界安防报警中心沿围界明敷至围界上各室外控制箱,采用环型组网方式,具体线缆配置见安防通信光缆结构图。
2.2.4.1网络传输子系统
本系统中前端探测器、摄像机、声光报警器等设备或自带网口,或通过接口转换器,利用以太网将数据传回控制机房、并通过网络实现设备间信号联动。智能视频子系统的视频信号经视频线传输至视频编码器,然后通过带光纤接口的以太网交换机将视频信号通过光纤传输至系统集成平台。每个固定视频系统或云台视频系统配置一个视频信号编码器,将固定摄像机的模拟信号编码成数字信号;智能视频监视系统配置一个智能视频控制盒,智能视频控制盒处理输入的视频信号,判断是否有人员侵入围界内,若有人员侵入,则控制云台转动跟踪入侵人员。如果数字视频子系统,则将前端数字摄像机直接接入以太网网交换机。在监控中心部署核心交换机连接各汇聚交换机,在弱电间部署接入交换机,接入交换机通过汇聚交换机接入核心交换机。
2.2.4.2供电及照明子系统
系统整体围界上设备和设施供电采用就近原则,供电电缆施工采用直埋和明敷两种方式敷设,除沿建筑物外墙之外都采用直埋的方式敷设,埋地深度为线缆顶部至地面距离不小于0.7米;在建筑物外墙沿建筑物外墙套采用管明敷方式。系统在围界范围所采用的各种低压电器设备必须满足工业电源要求180-260VAC。当围界防区周围照度不够时,辅助照明子系统可提高环境照度,提高视频监控在低照度环境下的监控质量。防区照明采用泛光照明,每个防区分为一个照明区域,每个照明区域由控制装置接受报警处理中心的联动控制开启。每个防区中每15~25米间距立一灯杆,每个灯杆上安装两盏节能灯,每盏节能灯的功率为30~50W,沿围界方向照射,灯杆固定安装在围栏或挡土墙上。20米范围内照度不小于10LUX,灯具应符合IP65要求。

